ROBOTICS PLATFORMS
Hands-on autonomous systems designed to teach sensing, control, wireless communication, and intelligent decision-making.
Hands-on autonomous systems designed to teach sensing, control, wireless communication, and intelligent decision-making.
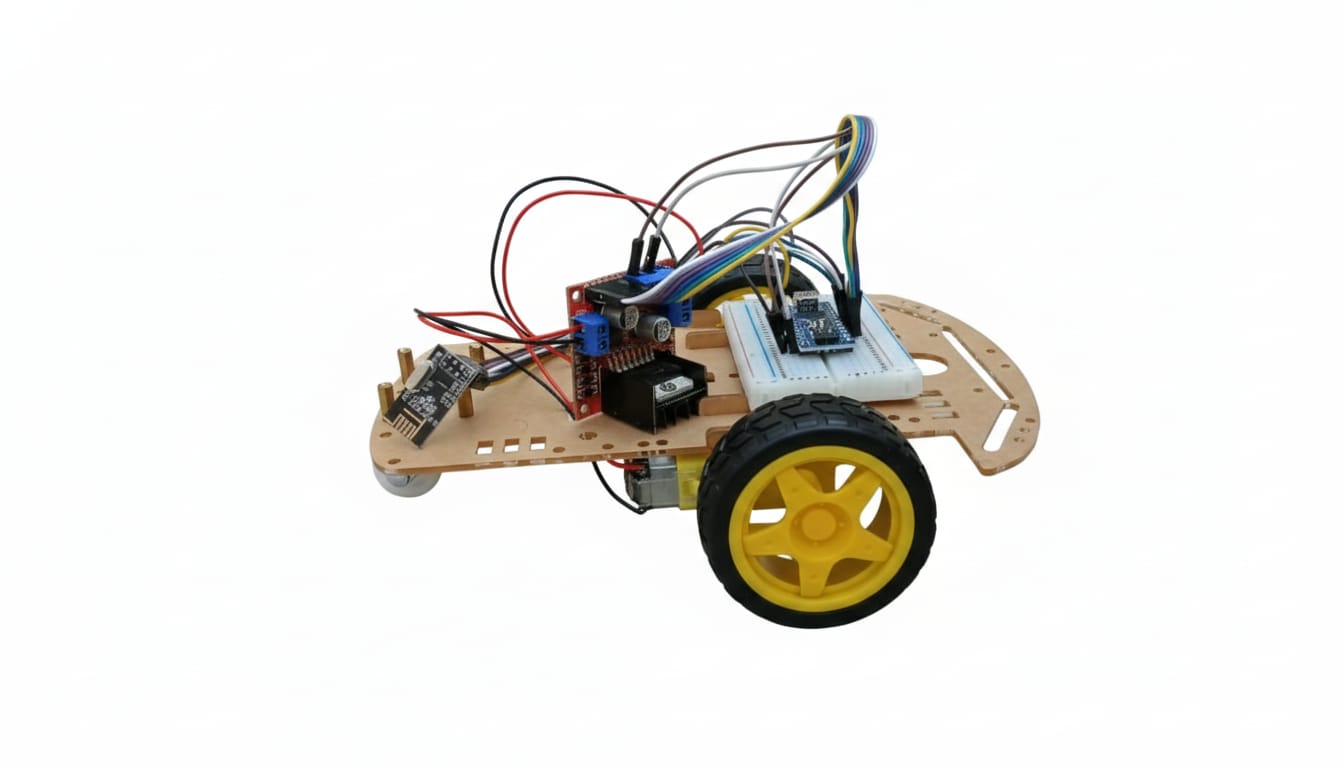
A wearable-controlled rover using an MPU6050 motion sensor and NRF24L01 wireless modules. Hand movements are translated into real-time rover navigation without physical controllers.

An autonomous 4WD rover that tracks and moves toward a light source using LDR sensors, demonstrating analog sensing, feedback loops, and differential motor control.
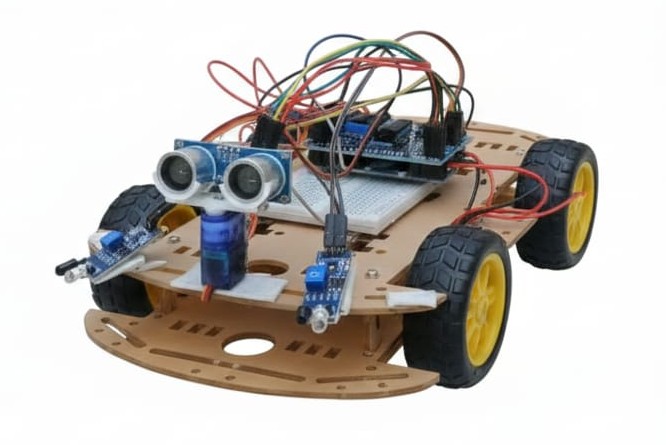
A dual-mode intelligent rover that follows predefined paths using IR sensors while dynamically avoiding obstacles with an ultrasonic scanning system.
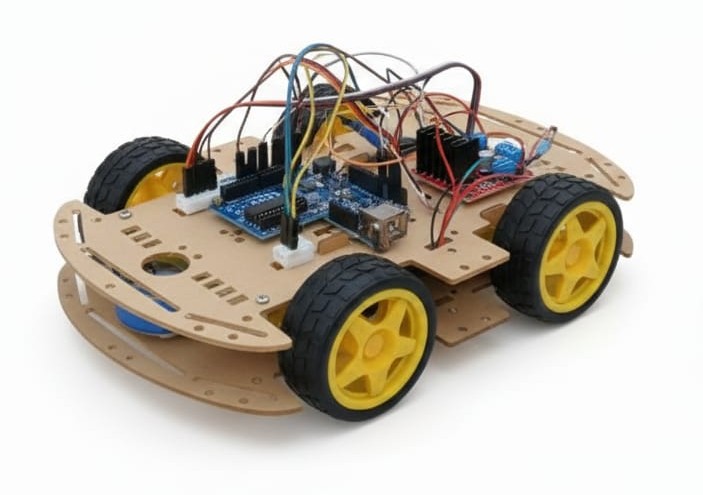
A smartphone-controlled robotic rover using Bluetooth communication (HC-05 / HC-06). Users can drive, steer, and control speed wirelessly while learning serial communication, motor drivers, and mobile-robot interfacing.